How we built an automatic scrubber dryer from scratch with our own funds
Hello! I’m Robert, I want to share a story about how we developed an automatic scrubber dryer for commercial areas.
Beginning
Two years ago, when I wondered how the world would be in 5–10 years’ time, I realized that everything would be as self-driving as possible. Convinced, we began to explore the ocean of new information. After a small brainstorming, we approved a concept in which the main thing we do is a universal software driver.

The one real plan is to drive the car on public roads. But at the same time, we were totally understanding of the capacity of the investment, so the minimum plan was a product that could be sold here and now. But at that time, we had no idea about it yet.
After a year of diligent development, our space localization system “saw the light”. After that, we asked the question: where to test it on. We had a “Flea” (a Chinese robot car), but it had the wrong kinematics. We did not know how to drive our Toyota Prius at that time.
We realized pretty quickly that the ideal minimum plan was to force a scrubber dryer to move around. The same one that gets pushed around shopping centers manually. We are the existing fulfillment operator, and it seems that an AGV robot would be most useful. But they are already quite numerous, and integrating them into other people’s warehouse processes is a real challenge. An automatic cleaning robot for commercial areas is a distinct advantage. You get rid of the human driver, you get the savings. Plus we understood the customer well: retail, warehouses, shopping centers, and subways. Next will be a diary of progress, eight months of creation.
1st stage
We had to find a contractor to do the iron and engineering part of our robot. Not having the slightest bit of experience, I began to explore the map, like in a “Heroes” game. I picked up CVs on job services and met with various specialists. In the end, I came to the conclusion that no one was doing anything like that, and even if they were, it was definitely not in industrial use. So I switched to companies that can be found by searching for “industrial design”. As a rule, they combine research, engineering, prototyping, and design.
I was so excited by the whole concept of inventing and creating something from scratch that I even wanted to open my own office.
But no:)
The prices claimed by the agencies were:
● 7–10 million with a non-industrial prototype
● around 5 million for design, without prototyping
After a long search, we chose a company that asked for 60.000$ to build a ready-made robot from scratch. They were recommended to us by acquaintances. The company had experience in building service robots, and there was clearly a systematic focus and knowledge of the business.
Let me remind you that the technology of self-driving movement was already done. It is based on the RTLS system (a reduced version of GPS, which we can install in any area). The advantage of this is that in commercial areas, relying on lidar mapping is very dangerous, as there are a lot of glass and reflective surfaces. We just have to make a product to suit our requirements.
We started by making a competitor analysis, made a comparative table, took apart the test subject, the Karcher brand, and made conclusions about:
● size and weight
● motor power, hoover, speed of rotation of the rollers
● сleaning area and tank size
● battery capacity
and many other parameters
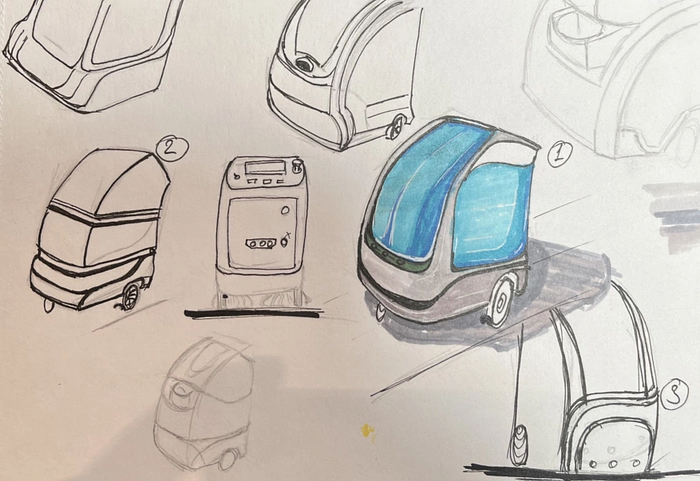
Based on these data, we made two sketches: with back leading wheels on gear motors and with front leading wheel and at the same time turning wheel, like in forklifts. The advantages of the first version were that the tank method of movement gives a turning on the spot, better maneuverability and the ability to clean corners, and also smaller sizes, proven motors and the brush are pressed by the weight of the machine and do not require additional mechanisms for lifting them.
The disadvantages are that the back wheels are always wet and there is a high chance of slippage. The wheels are blocked and this prevents human movement. There were also doubts about the constant brushes’ torque, which would shift the trajectory and require constant steering. In the end, we found a low-programming solution. The pluses of the second option are the actuator in front of the brushes and good thrust in the dry area. The minuses — cost and lack of experience with these wheels and proven suppliers, insufficient steering, a long base, and the brush lifting mechanism will also be required
Finally, we came to a decision and opted for the first option! The second stage was the design and positioning of the equipment.
2nd stage
A large part of the work took place invisibly for me and was basically focused on developing a technical project. However, I gained a bit of experience in industrial design.
Actually, there is a methodology for selecting a designer. In the first stage, companies identify 3 candidates. The company informs them that there will be three stages and that each stage can be stopped if the client considers further participation unnecessary. The first stage is made in pencil and each one has to make at least 10 sketches of a functional design. The object must be usable, understandable, and fulfill a key function. The deadline for such work is 24 hours, and the next day is used for criticism and selection.
In the second stage, candidates make technical adjustments, putting in a good look and detailing the directions. Still in pencil.
In the third stage, when the functionality is all done as it should be and there is nothing “left to cut”, designers begin to draw in colors, fractures, labels, and artificial complexity.
And only after that one finalist is taken out to 3D to “pull the beauty” on the frame design. Since the frame is no longer changed by the customer, it is often necessary to redraw the perfect 3D with the current inputs and it does not turn out well. Then other 3Ds can be looked at. For each 3D the designer has to give out 3 renders.
Especially in my case, I spent a month drawing different shapes, found the right one, added colors and gave it to the designer, who brought it out in 3D.
Generally speaking, the design of the cleaning robot is inspired by the tram and car field. This means that we have an understanding that it is a moving vehicle. It has to be clear where its front end is and where it has to move.
There was a lot of controversy regarding the positioning of the attachments, especially the lidar because it needs a maximum viewing angle (ideally 360 degrees) We designed it in a “ mouth “ shape. A stereo camera is made in a form of a “nose” and LED lines (they are also “eyes” and turn signals) to perform communication functions. In other words, when changing the trajectory to the right, the right “eye” blinks.
In the development of a set of technical design documents, the following work has been carried out:
1. Re-engineering and implementation of refined data of purchased risky items into the model have been carried out.
2. We developed the technical project of the scrubber dryer with drawing of all the important units, locations and fixing methods.
3. Final calculations have been made:
a) of the power units needed to set the machine in motion;
b) the brush drive power;
c) strength calculations of the frame, actuators and critical components.
4. Made the required drawings and sketches for ordering and manufacturing unique parts.
5. Design of the appearance and “body” for manufacturing by vacuum forming method has been made. Prepared 3D models for ordering master models and matrixes.
6. Specification of the BOM with all the necessary details of mechanical units for purchase or manufacture was made.
7. Structural development of the retrofit kit: electronic circuit, BOM, board trace, board software development, board fabrication by urgent production, PCB sample board assembly.
3rd stage
Originally the basic design of a scrubber dryer robot was to be made by reversing and/or retrofitting commonly used manual machines. But the first steps in this direction showed an obvious economic and technical disadvantage. So we decided to make everything from scratch: the design, the mechanical and electrical parts, and the cleaning system had to be developed.
The design is based on current trends in vehicle friendliness, ergonomics and serviceability. We have equipped the robot with all the necessary basic safety elements: parking sensors, surface sensors, sensitive bumpers, emergency stop buttons, etc.
The rolling chassis was based on a differential drive for simple and efficient construction. This drive prohibits free spinning of the drive wheels, so we had to give the robot a separate manual transportation system.
The cleaning system was equipped with standard components and mechanisms of manual scrubber driers, aiming to simplify the servicing of the product. To implement the control and monitoring architecture, we designed and manufactured our own motherboard, into which we integrated some of the power electronics. The power supply system itself was based on typical batteries and circuit solutions.
Result
It seems like a lot of work has been done, but 2/3 of the way there is still to go. In the next year, our goal is to run several pilots and sell at least 10 robots.
The plan for 2024 is to sell about 200 robots. We are already in talks with a potential distributor.
Preliminary math: the robot costs 30.000$ and the monthly subscription is 1.3–1.5k/month. Every major retail chain has 40–50 suitable shops with maximum floor space. Under such conditions, cleaning disposal is as efficient as possible.
In today’s world, it is possible to create a workable product for comparatively little money. The main skill is searching for information and managing working teams.
